Recently, Jaguar Land Rover and the UK Engineering and Natural Research Council (EPSRC) jointly invested £11 million to conduct a full-scale research on driverless vehicles. According to Che Yunyu, the cooperation is led by Jaguar Land Rover. The research institutes of the 10 universities in the UK and the British Transport Research Institute are involved in technology research and development. There are five projects aimed at creating a smart connected car that can achieve 100% driverless driving.
This article refers to the address: http://
According to the functions and research objectives of these projects, the successful implementation of the entire plan needs to solve the following problems:
1 How to use radar and image sensing systems to accurately “interpret†the external environment and real-time road conditions to effectively identify other road users;
2 How the driver reacts to a completely unmanned driverless system;
3 How the driverless system should be designed to accommodate drivers with different characteristics and habits;
4 Exploring what is the best time for human driver and automatic driving system to switch, how to ensure the smooth switching process and driving safety;
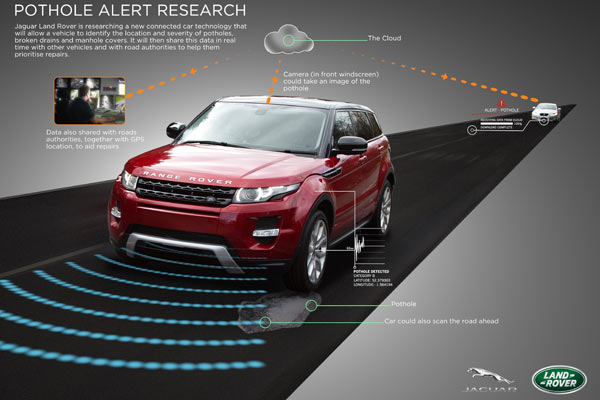
5 How to better integrate driverless control systems and cloud computing services into the car;
6 How to use data from smart infrastructure, drivers, and driverless cars to enhance the interactivity of the entire transportation system.
Dr. Wolfgang Epple, Jaguar Land Rover Technology R&D Director, said, “In order to make 100% of driverless cars commercially available, we need drivers, pedestrians and other road users to have confidence in autonomous driving technology, recognizing the technology. Safe, reliable and practical. This collaboration brings together experts and scholars from relevant fields in UK universities and research institutions to provide theoretical support for the basic research work of pre-driver development."
According to the relevant information reported by foreign media, Che Yunyin brings you a detailed interpretation of these five projects:
For unmanned/drive assistance systems, widely used low frequency terahertz radar sensing and video sensing technology: Dr. Marina Gashinova
Responsible Unit: University of Birmingham / University of Edinburgh / Heriot-Watt University
The project combines the advantages and disadvantages of low-frequency terahertz sensing and video analysis technology, and effectively integrates and cross-examines the two. The car sensing and information control system can process the data stream returned by the two, and then draw a clear surrounding topographic map, and in time, the pits and fluctuations of the road surface can be monitored in any weather condition. Of course, the technology can also detect and effectively distinguish other road users (pedestrians, motor vehicles, cyclists, etc.).
According to Che Yunyu, the three universities participating in the study have their own strengths. The University of Birmingham has long-standing experience in the development of automotive radar technology; Edinburgh University specializes in signal processing and radar imaging technology; and Heriot-Watt University has made great achievements in video analysis, lidar and acceleration algorithms.
Human-Computer Interaction Research: Laying the Foundation for Vehicle Design for Unmanned Systems: Professor Neville Stanton
Responsible unit: Southampton University & University of Cambridge
By extensively collecting data on the operational behavior of different drivers in simulators, test sites and real road conditions, to further explore the driver's response to this new technology and how to better design a human-computer interaction system.
All research on human-computer interaction and interactive interface design will be carried out in the simulator and test site. On the test road, by collecting the driver's physiological and psychological state data, to further improve and explore whether a highly customized automatic driving system can be realized, ready for the final real road test.
First, the entire research team will model driver behavior in the lab, initially designing an inclusive, user-centric human-computer interaction interface. These designs will then be tested in the simulator (connecting a Jaguar XJ to a computer with a large projector and screen). The staff is classified according to the age, gender, driving age and ability of the driver to be tested, and various automatic driving systems (unmanned driving, automatic parking, etc.) and interactive interfaces are tested under different driving environment conditions. The purpose of this research is to achieve a highly customized driverless system that maximizes the needs of different consumers.
Focusing on driver cognition, optimization research on control transfer in adaptive autopilot mode: Cao Dongjun (transliteration)
Responsible unit: Cranfield University & University College London
This study aims to ensure safe, smooth and rapid control transfer between the driver and the vehicle controller in adaptive autopilot mode.
In accordance with current planning, the entire project team will begin to lead a comprehensive study on "driver and vehicle controller interaction, driver attention and cognitive control characteristics." The optimized design of the control transfer system ensures that driver perception is systematically developed.
But the challenge for this interdisciplinary approach is how to effectively integrate experimental results in the fields of engineering, cognitive neurology, and human factors. The project not only promotes innovation in driverless technology, but also promotes research on human attention and cognitive control under human-computer interaction.
Head of Security Research for Cloud-Based Decentralized Control Systems in Driverless Vehicles: Dr. Mehrdad Dianati
Responsible unit: Surrey University, Imperial College London, Warwick University and the UK Transport Research Laboratory
The main research direction of the project is to design and verify the rationality of the networked driverless car frame. According to the plan, the researchers will consider and make full use of the advantages of intelligent networked cars and autopilot systems, while planning to build a cost-effective networked driverless system platform, after the technology is mature, push it to the vector model.
The key to this research is the effective integration of modern wireless communication technology and cloud computing technology, which not only can share some expensive computing resources (which can significantly reduce costs), but also provide some exclusive information that only exists in the cloud server. . However, the challenges faced by the project are mainly from ultra-low latency wireless technology, cloud computing, decentralized control systems and human-computer interaction. In addition, after the commercialization of technology, automakers are also facing potential cyber hacking, which may be one of the concerns of consumers in the future.
Head of Collaboration Mechanism Research for Driverless Smart Cars: Dr. Nathan Griffiths
Responsible unit: Warwick University
The main purpose of the research is to develop intelligent driver systems and technologies with collaborative and behavioral modeling capabilities that enable unmanned systems to learn not only the driver's operating habits, but also the car, car, and urban infrastructure. Collaborate with each other.
Therefore, in order to achieve the ultimate goal, this research requires the development of software algorithms in the early stage, using the experimental methods in behavioral science, as well as the analysis and processing of data obtained by connected cars, understanding the driver's operating habits, and developing strategies to encourage behavioral correction. For example, set a reasonable price to reduce the occurrence of random parking and traffic congestion.
In addition, when the driver “takes over†or “hands over†vehicle control, or the driver interacts with other road users, the project will also explore how to achieve optimal interaction between the driver and the driverless car.
It is worth mentioning that most of today's models are equipped with hundreds of microcomputers and sensors, and equipped with cameras, radar, GPS and telemetry equipment, can measure the speed, braking, steering and the surrounding environment. Of course, the wireless communication function is becoming the standard model of the current model, and the data can be uploaded to the cloud server in real time, and can be used after analysis and processing. These data also help the vehicle to better understand the driver's behavior and surrounding road conditions, laying the foundation for intelligent car and complete driverless.
If you are looking for AC-DC safety marks power supply for smart home appliances, ZhenHuan Group can help you. We offer the complete power supply adapter DC transformer solutions with 3 years warranty. All external power supplies are designed to meet international UL CE FCC EMC KC GS RoHS RCM SAA PSE CCC safety standards, also meet the latest energy efficiency Level VI standard.
AI Home Appliances Power Supply
Universal Input Smart Wall Plug Adapter,Power Adapter for Smart Home Appliance,Microscope Smartphone Adapter,Ac Dc Power Adapter for Smart Led TV
Shenzhenshi Zhenhuan Electronic Co Ltd , https://www.szzhpower.com