Research on Speed ​​Control System of Permanent Magnet Synchronous Motor Based on Vector Control
In recent years, with the rapid development of power electronic technology, microelectronic technology, new motor control theory and rare earth permanent magnet materials, permanent magnet synchronous motors have been rapidly promoted and applied. Permanent magnet synchronous motor has the advantages of small size, low loss and high efficiency. Nowadays, when energy conservation and environmental protection are paid more and more attention, research on it is even more necessary.
1 Mathematical model of permanent magnet synchronous motor
In order to facilitate the analysis, some parameters with less influence are often ignored when establishing the mathematical model, and the following assumptions are made:
(1) Ignore the saturation of the motor core;
(2) Excluding eddy current and hysteresis loss in the motor;
(3) The magnetic fields generated by the stator and rotor magnetomotive forces are distributed sinusoidally along the inner circle of the stator, that is, all spatial harmonics in the magnetic field are ignored;
(4) The windings of each phase are symmetrical, that is, the turns and resistance of each phase winding are the same, and the axis of each phase is displaced by the same electrical angle from each other.
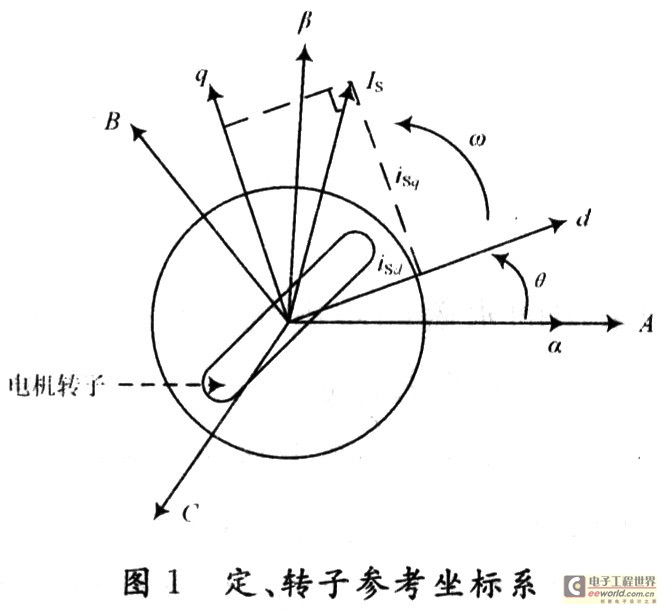
When analyzing the mathematical model of the synchronous motor, the coordinate transformation method is often used. The commonly used coordinate systems include the two-phase synchronous rotating coordinate system as the dq coordinate system and the two-phase stationary coordinate system as the αβ coordinate system. Therefore, the mathematical model of the permanent magnet synchronous motor in the quiet rotating coordinate system (see Figure 1) is:
If the motor is a hidden pole motor, that is, Ld = Lq, the stator current id, iq and the mechanical angular velocity ω of the motor are selected as state variables. The state equation of the permanent magnet synchronous motor can be obtained as shown in the following formula:

It can be found from the above formula that the three-phase permanent magnet synchronous motor is a multivariable system, and there is a nonlinear coupling relationship between id, iq, and ω. To achieve high-performance control of the three-phase permanent magnet synchronous motor, it is A very challenging subject.
2 Vector control of permanent magnet synchronous motor
The high-performance AC speed regulation system needs the support of modern control theory. For AC motors, the most widely used and already applied in actual systems is the vector control theory. In 1971, by F. The vector control theory proposed by Professor Blaschke, the basic principle of vector control is: the rotor flux is the rotating space vector as the reference coordinate, the stator current is decomposed into two components orthogonal to each other, one is in the same direction as the flux, representing the stator current The excitation component, the other is orthogonal to the direction of the flux linkage, represents the stator current torque component, and is independently controlled separately to obtain good dynamic characteristics like a DC motor. After the coordinate transformation of the permanent magnet synchronous motor mathematical model, there is still coupling between id and iq, and independent adjustment of id and iq cannot be achieved. If you want to obtain good dynamic and static performance of permanent magnet synchronous motor, you must solve the problem of decoupling of id and iq current. If id = 0 can be controlled, the state equation of the permanent magnet synchronous motor can be simplified as:

At this time, id and iq have no coupling relationship, Te = npψfiq, and the torque can be linearly controlled by independently adjusting iq.
3 Algorithm of permanent magnet synchronous motor based on PI control
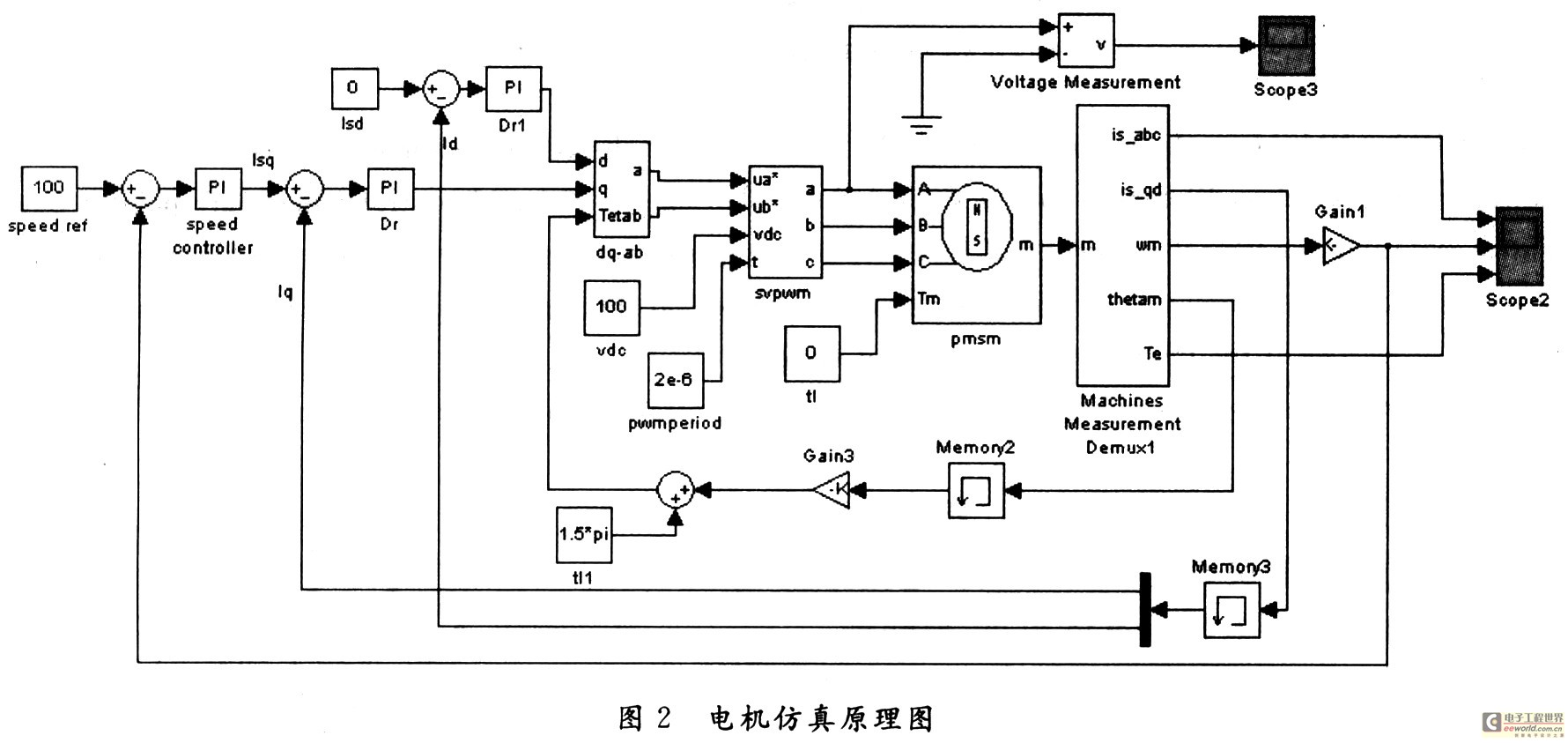
In Matlab / Simulink, the simulation model of the AC speed control system of permanent magnet synchronous motor using PI control is built, and the simulation research is carried out. The current loop and speed loop adopt the PI control widely used in the engineering field to verify the effect of the system using PI control The schematic diagram of the simulation is shown in Figure 2.
The parameters of the permanent magnet synchronous motor used in the simulation are as follows: RS = 1. 9 Ω, Ld = Lq = 0.01 H, rotor permanent magnet flux ψf = 0.353 Wb, rotational inertia J = 7.24 × 10-4kg · M2, rated speed is 3 000 r / min, rated torque is 4 N · m, rated current is 3.3 A.
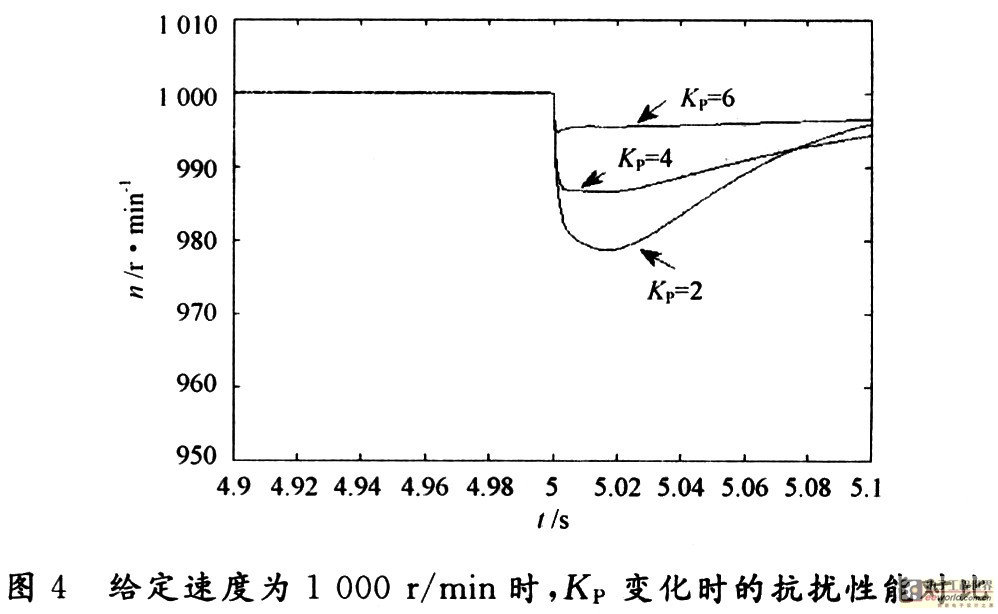
First, examine the effect of gain P in the PI controller on system performance. In the PI controller, when the fixed integral gain K1 = 10 and the proportional gain Kp = 2, 4, 6 are changed, the dynamic curve of the motor at a given speed of 1 000 r / min is tested separately, and the comparison effect is shown in the figure 3. Figure 4.
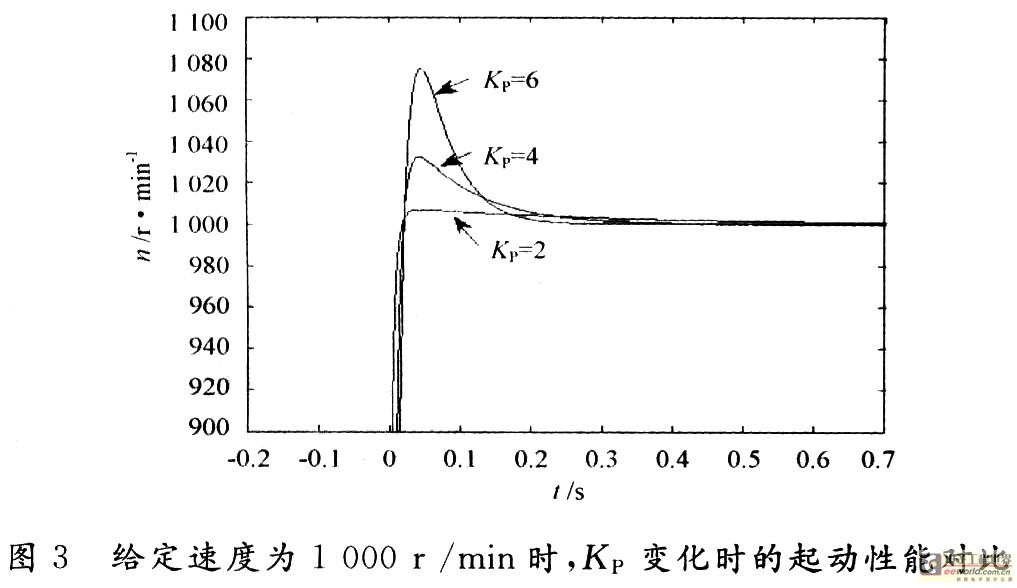
It can be seen from Figures 3 and 4 that as the proportional gain KP increases, the overshoot of the system increases and a static error occurs, but the anti-disturbance capability of the system is enhanced.
Next, we examine the effect of integral changes on system performance. In the PI controller, when the fixed proportional gain KP = 5 and the integral gain K1 = 5, 20, 30 change, test the dynamic curve of the motor at a given speed of 1 000 r / min, and obtain the comparison effect as shown in Figure 5. , Shown in Figure 6.
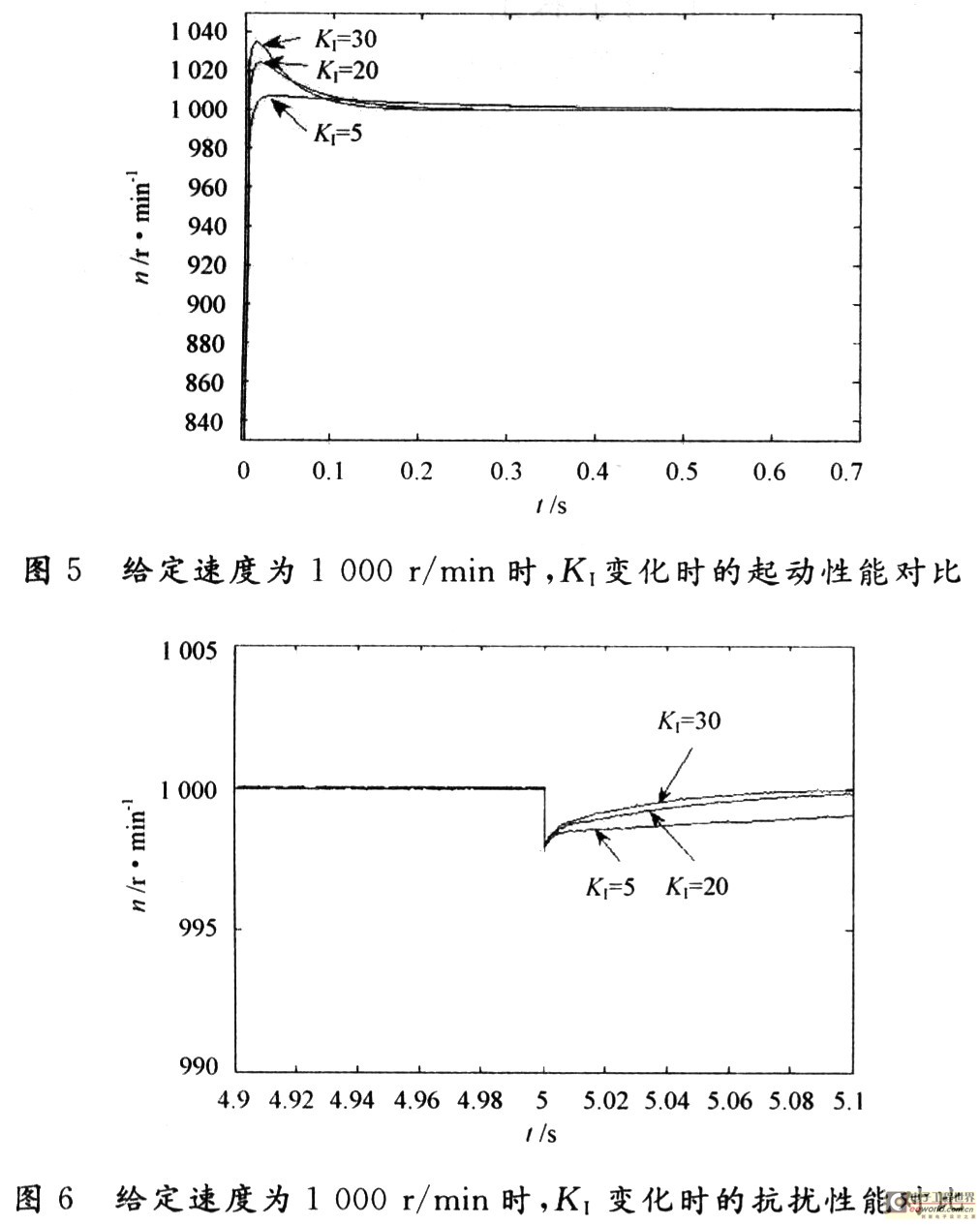
It can be seen from Fig. 5 and Fig. 6 that increasing the integral gain K1 is helpful to eliminate the system static error and reduce the recovery time. The improvement of the system's anti-disturbance ability is limited, and it will increase the system's overshoot.
From the simulation results, it can be seen that the parameters of the PI controller have a great influence on the performance of the system. In practice, a set of parameters with good performance needs to be adjusted out, especially for the AC speed regulation system using the PI controller, it is in different Different PI parameters need to be adjusted in the environment. Therefore, it is more important to master the parameter adjustment rules of the PI controller. But as we all know, permanent magnet synchronous motor is a nonlinear object with strong coupling, it is difficult to describe with an accurate mathematical model, and the application environment of the motor is generally complicated and there are often various interferences, motor parameters will occur during the operation of the motor Variety. The PI controller is a linear controller that is not robust enough, has poor adaptability to load changes, weak anti-interference ability, and control performance that is easily affected by model parameter changes. Therefore, the application of PI controller in AC motor speed regulation will have some shortcomings due to its own characteristics, for example: the range of control objects applicable to PI controller parameters is not large enough, and it is set to the optimal PI parameter in a certain state In another state, it is not necessarily the best; the same PI parameter is generally difficult to apply to different motor speeds. For different speed ranges, the PI parameters need to be adjusted separately, which increases the difficulty of on-site debugging.
4 Algorithm of permanent magnet synchronous motor based on extended state observer
Permanent magnet synchronous motors are affected by factors such as changes in motor parameters (such as resistance, inductance, inertia, and flux linkage), external load disturbances, and nonlinearities. Decoupling based on accurate motor models is difficult to achieve, and classic PI control is difficult to overcome The influence of these undesirable factors cannot achieve satisfactory control effects. In [10, 11], the extended state observer is applied to the design of an auto-disturbance controller, and a good control effect is obtained, but this controller has multiple adjustable parameters, which gives the parameter debugging work in industrial applications. Difficulties are coming. In order to simplify the controller design and reduce the adjustable parameters, a linear expansion state observer is used to observe the state and disturbance of the motor model, making the controller design simpler and requiring fewer parameters to be adjusted. According to the first-order differential equation model of permanent magnet synchronous motor, combined with the design method of the expanded state observer, the design of the controller is carried out.
From equation (4), we can see that the disturbance of load torque, friction coefficient, inertia and disturbance caused by b0 estimation error can be reflected in a (t). If a (t) can be observed and compensated, the anti-disturbance capability of the system can be significantly improved. The structure chart of the controller is shown as 7.

The expression of the proportional controller based on the expanded state observer is as follows:
(1) ESO: 
(2) Control law:

According to theoretical analysis, the observation effect of ESO depends on the pole -p (p> 0). -p (p> 0) is related to the tracking speed of ESO. The larger p, the faster the response of the ESO tracking output signal, that is, the faster the response of z1 to the speed ω. The proportional gain should usually be large, but excessive Kp will make the speed response oscillate and cause system instability.
The proposed control algorithm based on the extended state observer has good observation and suppression effect on the system disturbance, which is theoretically superior to the PI control method. Here, simulation verification was carried out under Matlab. At a given speed of 1 000 r / min, PI and PESO were adjusted to the optimal control effect respectively, and the comparison curve of the speed response was obtained as shown in Figure 8 and Figure 9 As shown.
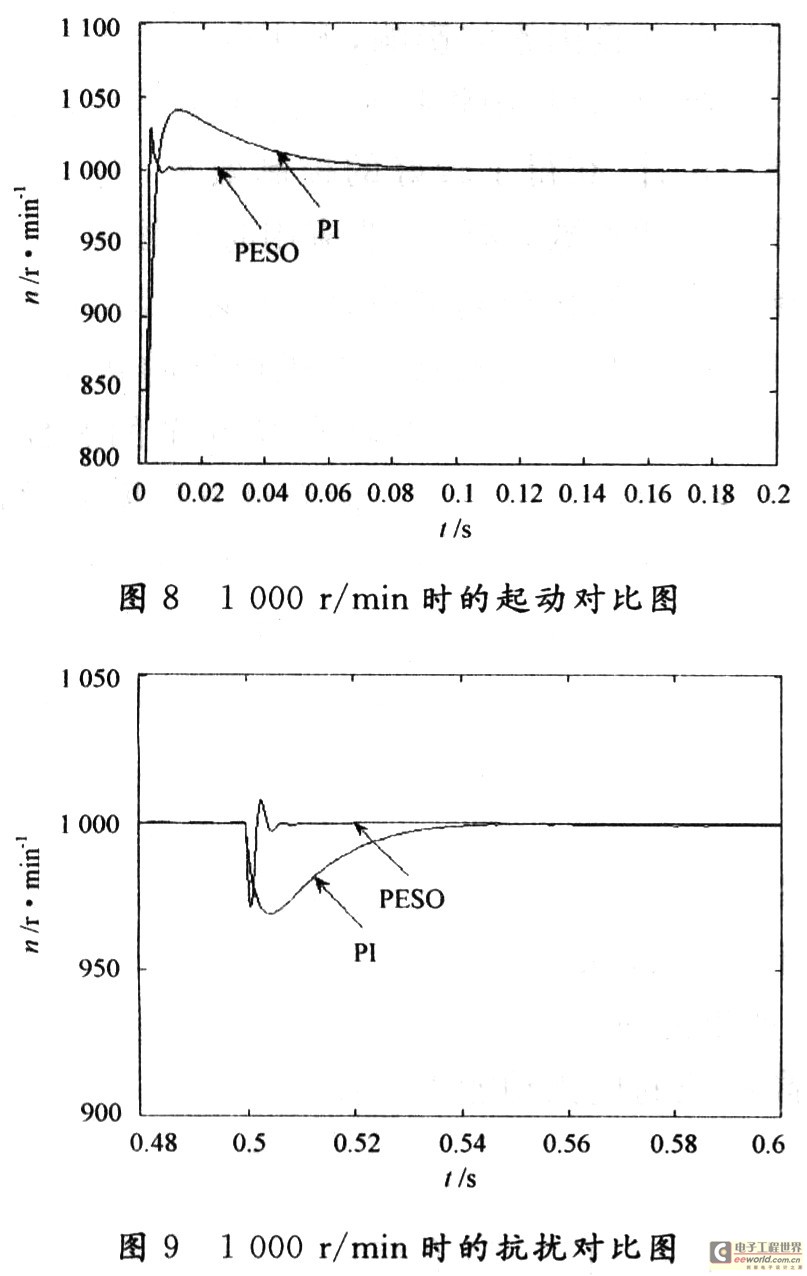
The control algorithm of the permanent magnet synchronous motor based on the expanded state observer is adopted. By comparing with the PI algorithm, the contradiction between the PI algorithm and the overshoot cannot be solved. The same PI parameter cannot be adapted to different motor speed ranges, Pl The shortcomings of parameters need to be adjusted separately. The simulation results verify that PESO has a faster response speed, and when the system is disturbed, it can better suppress the system's disturbance and quickly return to the given speed. It has a strong anti-disturbance capability and the control performance is significantly better than PI control.
5 Conclusion
In the vector control technology applied to the speed control system of permanent magnet synchronous motor, firstly a PI control based permanent magnet synchronous motor algorithm, although the algorithm can meet the basic requirements of permanent magnet synchronous motor speed control system, but there are some deficiencies Then, an improved algorithm of permanent magnet synchronous motor based on extended state observer is proposed. This algorithm can make the performance of the speed regulation system of permanent magnet synchronous motor better, and the designed controller has a faster response to the motor speed. Speed, strong anti-disturbance ability, achieved satisfactory control effect. With the development of motor manufacturing and control technology, as well as the further development of power electronic technology and microelectronic technology, the new nonlinear control strategy will have good prospects for improving the performance of permanent magnet synchronous motor AC speed regulation system.
WS2813 digital led trip is double signal transmission led pixel strip.
This is the special function of WS2813- Break-point resume.
that it means when one of the led bead was broken,the next led will still working.
With this function, the WS2813 is more suitable the large projects than other IC.
The more fast transmission rate and 256grays, the WS2813 Digital LED Strip is the first choice for large projects.
WS2813 Digital LED Strip
Dream Color LED Strip,Addressable RGB LED Strip,WS2813 LED Strip,WS2813 Digital LED Strip
SHEN ZHEN SEL LIGHTING CO.,LTD , https://www.sel-lighting.com