With the increasing degree of automation, machine vision plays an increasingly important role. Traditional 2D positioning cannot solve the spatial coordinate information of products, and 3D binocular stereo vision can provide higher precision positioning. In the automotive industry, the handling of the rear floor of the car is mainly handed over to the industrial robot. This faces a big problem: the plane coordinate XYR and the space coordinate ZWP of each backplane are quite different, and the two sharp points of the robot fixture must be Accurate insertion into the bottom plate and two holes for handling.
Huiyan Automation Technology (Guangzhou) Co., Ltd. has a professional machine vision system development technology. For this purpose, a 3D binocular vision software system has been developed. The system is equipped with two industrial cameras to accurately calculate the six spatial coordinates of the backplane XYZWPR. And send the coordinates to the robot, successfully solved the problem for the customer.
2, 3D binocular stereo vision system installation and principle
2.1 Installation method:
Industrial cameras and light sources are mounted on both ends of the flange face of the robot, as shown in Figure 1.

Figure 1 camera and light source installation
2.2 Principle
The first step is to calibrate the calibration plate and establish the coordinate system relationship between the image, the camera and the robot.
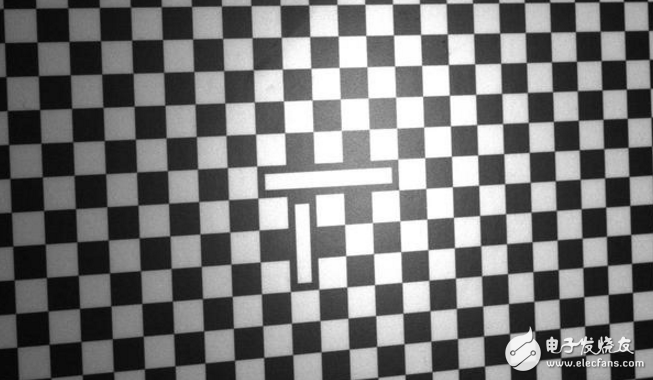
Figure 2 Calibration correction
The second step: taking photos of three different positions of the rear floor, respectively performing feature matching, and calculating the coordinates XYZ of each matching feature by the parallax principle.
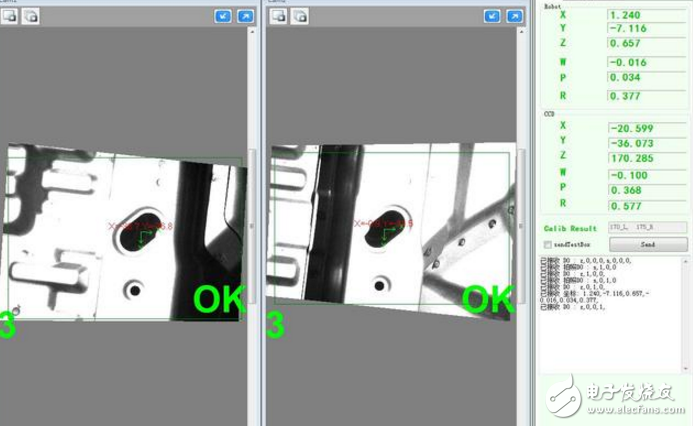
Figure 3 software interface
The third step: according to the matching feature coordinates obtained above, the space coordinate XYZWPR of the backplane is calculated, as shown in the right interface of FIG.
Step 4: Send the XYZWPR coordinates to the robot via the TCP/IP protocol.
3. Prospects
The 3D binocular stereo vision system enables the robot to have a pair of eyes, providing the robot with precise positioning and completing functions that cannot be achieved by 2D positioning, which greatly improves the generation efficiency and reduces labor. It can be applied to industrial applications such as part identification and palletizing. With the increasing application of industrial robots, 3D binocular stereo vision will have broader application prospects.
Power X (Qingdao) Energy Technology Co., Ltd. , https://www.solarpowerxx.com